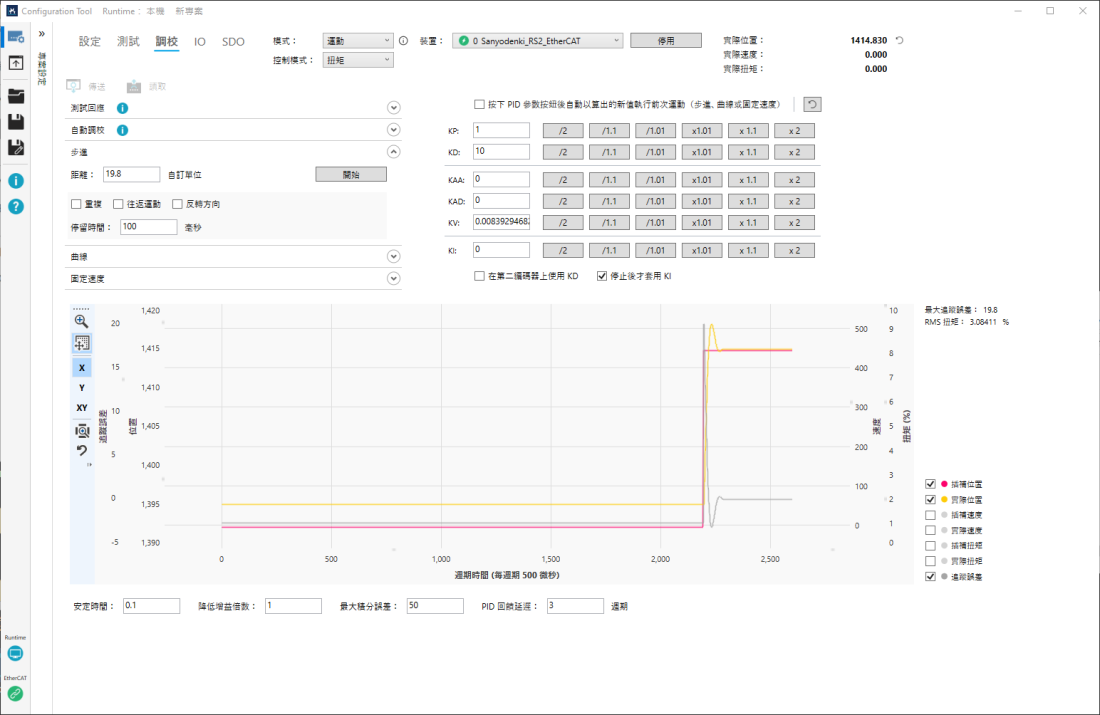
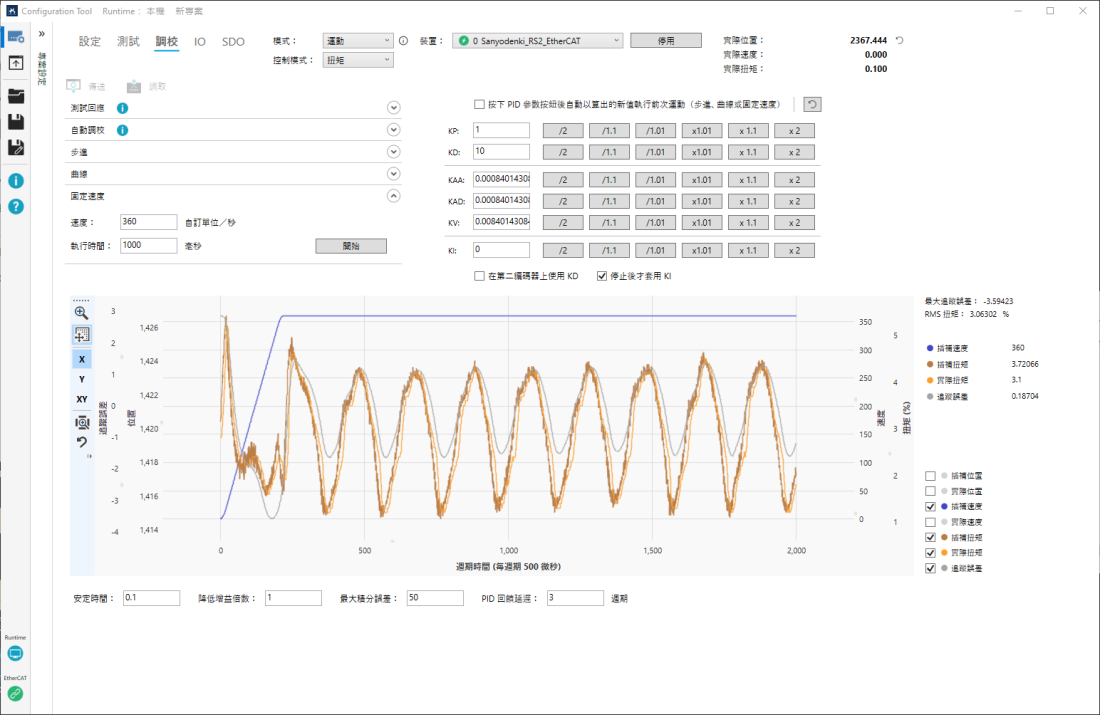
使用 KINGSTAR 微調 PID 參數以優化控制系統,伺服驅動器的 PID 控制結果將依所選的控制模式顯示在圖表上,包含速度、位置或扭矩曲線。例如選擇扭矩模式,則圖表將顯示插補扭矩與實際扭矩,兩條線越接近表示結果越好。
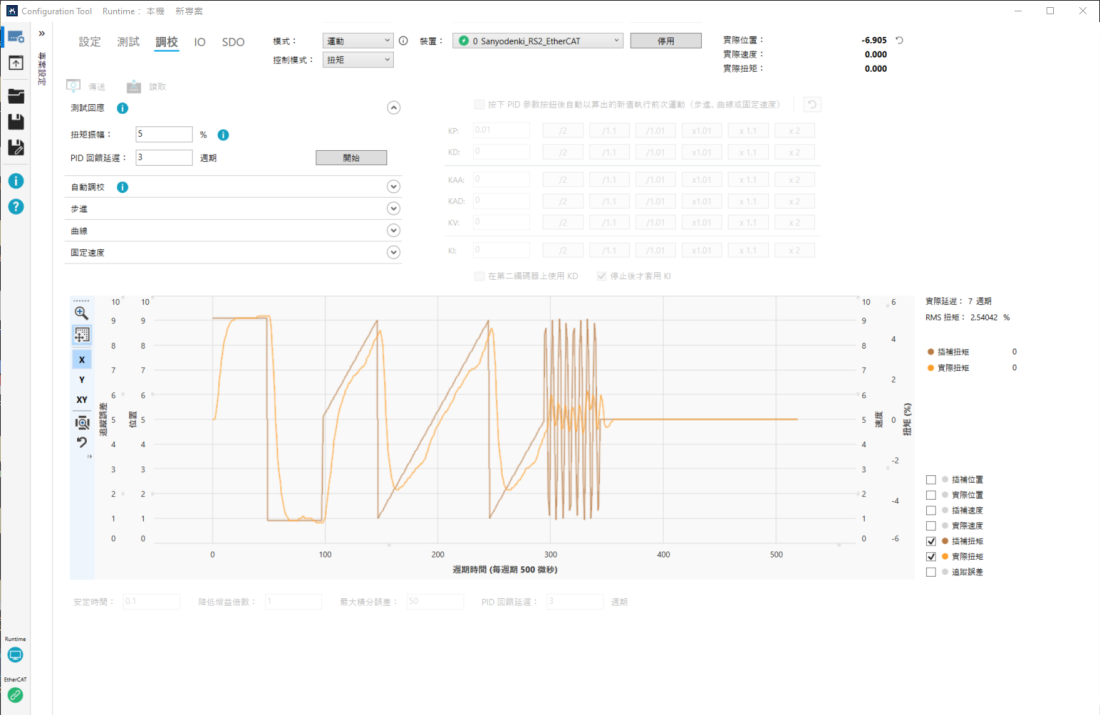
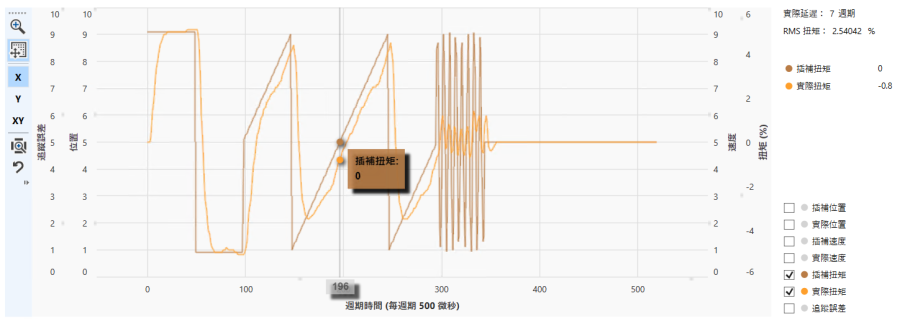
顏色代表各屬性,可勾選或取消勾選屬性選框以檢視其曲線,欲檢視曲線上的值,可將滑鼠游標放在線圖上。
設定工具中所有的運動參數皆受單位轉換(調校設定區域)與加速度單位 (設定 > 運動) 影響。更多關於加速度單位的運作方式請見:概念解說 > 運動曲線類型。
| 單位/秒 | 延遲(秒) | |
|---|---|---|
| 單位轉換 (開) |
目標/距離:使用者單位 速度:使用者單位/秒 加速度:使用者單位/秒2 減速度:使用者單位/秒2 加加速度:使用者單位/秒3 加加加速度:使用者單位/秒4 |
目標/距離:使用者單位 速度:使用者單位/秒 加速度:秒 減速度:秒 加加速度:秒 加加加速度:秒 |
| 單位轉換 (關) |
目標/距離:計數 速度:計數/秒 加速度:計數/秒2 減速度:計數/秒2 加加速度:計數/秒3 加加加速度:計數/秒4 |
目標/距離:計數 速度:計數/秒 加速度:秒 減速度:秒 加加速度:秒 加加加速度:秒 |
傳送與讀取
設定、測試與調校頁面中的「傳送」與「讀取」按鍵都是連動的,意旨若在任一頁面改變了與軸相關的某些設定,相關的改變將在其他頁面被標註。更多關於按鍵的資訊請見 設定 > 傳送與讀取。
在調校頁面中與「傳送」和「讀取」相關之設定為 PID 參數 (包含圖表下方的設定)。
傳送:將新值套用到 KINGSTAR 子系統,點擊「傳送」以後,設定工具將提醒您設定將改變。
讀取:讀取 KINGSTAR 子系統的值,點擊「讀取」以後,設定工具將提醒您所讀取的值將會覆寫欄位中的值。
測試回應
測試伺服驅動器之 PID 控制以檢視軸是否正常運作,依控制模式不同,KINGSTAR 將直接發送位置、速度或扭矩指令至伺服驅動器,並依照驅動器的回饋顯示於圖表上,若回饋結果為佳,代表驅動器對於所選的控制模式反應良好,否則可能需要使用伺服驅動器提供的工具進行調校,或使用其他控制模式。欲了解回饋結果是否為佳,請見 使用設定工具 中的 調校。
移動(位置模式) / 振幅(速度模式)/ 扭矩振幅(扭矩模式):軸移動的距離,單位在不同模式將有所不同,請見 裝置配置 以查看單位。
速度:軸的速度,僅支援位置模式。
PID 回饋延遲:指週期數,此週期數為 KINGSTAR 用來比較實際位置與之前發送的命令位置的回溯週期,通常為 3 個週期。
開始:使用目前的設定來測試軸。
自動調校
重複執行 步進 與 T 曲線 測試以產生一組 PID 參數,自動調校僅支援速度與扭矩模式,您可使用自動調校以快速取得一組可用的 PID 參數,接著將自動調校所產生的值微調到您所需的 PID 參數值,您可將 PID 存成 .kst 檔或標示註記以保存參數。
自動調校可能因為機器不穩定而失敗,但就算失敗仍可產生一組 PID 值做為參考,您可將自動調校所產生的 PID 值持續進行手動調校,直到其達到您所需的運作狀態,相對於手動調校,自動調校能更快速的找到適用的 PID。
建議使用以下自動調校週期:
速度模式:1 毫秒或更低。
扭矩模式:500 微秒或更低。
重要:若非使用所建議的週期則可能造成運作不良、錯誤或損壞。
注意:若週期過慢,自動調校將停用,欲使用自動調校,請至連線設定>EtherCAT 設定 並降低週期時間的值。

註:當自動調校在運作時,在第二編碼器上使用 KD 選項將自動取消勾選,因自動調校所給的參數僅供主要編碼器使用。欲使用第二編碼器,則需手動調校 PID。
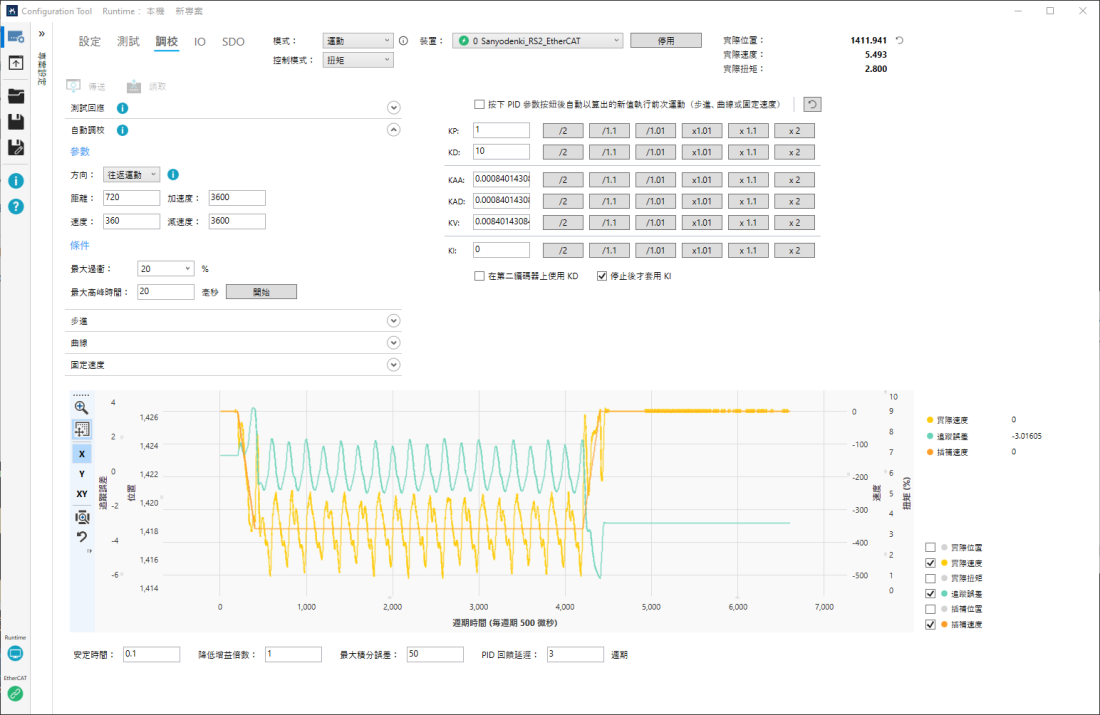
方向:T 曲線移動方向,預設為 往返運動。
單向:軸以單一方向移動,該方向由 距離 的值所決定,若 距離 為正則方向即為正,反之則為負,預設為正方向。
往返運動:軸來回移動。
距離:T 曲線移動的距離,該值可為正或負,會影響 方向。
速度:T 曲線移動的速度,該值需大於或等於零。
加速度:T 曲線移動的加速度,該值需大於或等於零。
減速度:T 曲線移動的減速度,該值需大於或等於零。
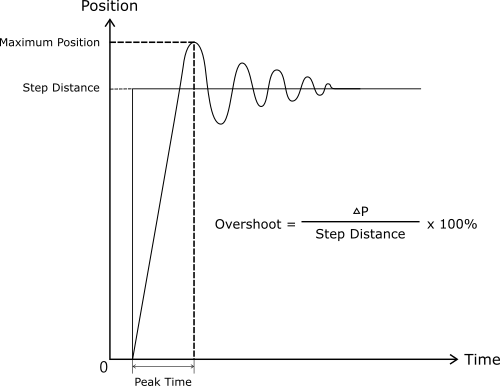
最大過衝:決定軸超越步進距離的百分率,僅支援扭矩模式。
範例:
起始位置:零
步進距離:10
過衝:12
最大過衝: =
=  =
=  = 20%
= 20%
最大上升/高峰時間:訊號由指定的低值變為指定的高值所花費的時間,值越低,時間越短而軸移動越快;值越高,時間越長而軸移動越慢。
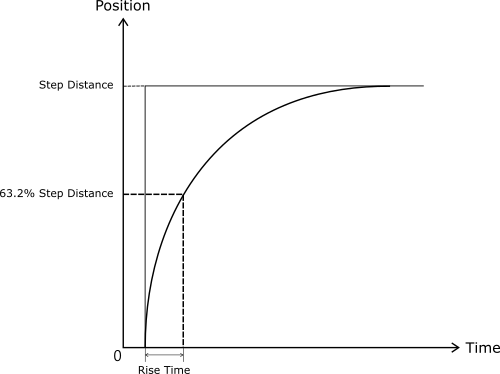
最大上升時間(速度模式):步進測試中軸從起始位置移至 63.2% 的距離所花費的時間。例如想要軸從零移動到 10,則上升時間為 6.32。
最大高峰時間(扭矩模式):步進測試中軸從起始位置移至發生最大過衝位置所花費的時間。
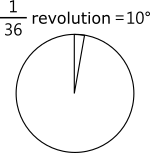
步進距離:
設為 1/36 轉速的內部參數,若將單位轉換成度數,此參數將會是 10 單位,若未使用單位轉換,則為 1/36 x 轉數。
範例:
每轉計數:10000
步進距離:10000 x 1/36 ≈ 277.78
上升時間
高峰時間
步進
命令一小段運動並檢查該運動的回應是否夠快,套用修正後真實位置與插補位置的差別為穩態 (steady-state) 誤差。
距離:設定一個步進距離以進行調校。
開始/停止:開始或停止步進運動,點選「開始」後,按鍵即變為「停止」。
重複:重複最後一個動作,若勾選此選項後點擊「開始」,直到點擊「停止」前,系統都會持續計算並產生新的運動曲線圖。
往返運動:來回移動。
反轉方向:反轉運動方向。
停留時間:在系統產生圖表前新增額外的秒數以查看軸在完成移動後的動作,由此可確認所有運動皆包含在圖表中。例如若某運動耗費一秒而停留時間設為 0.2,則產生圖表的時間為 1.2 秒。
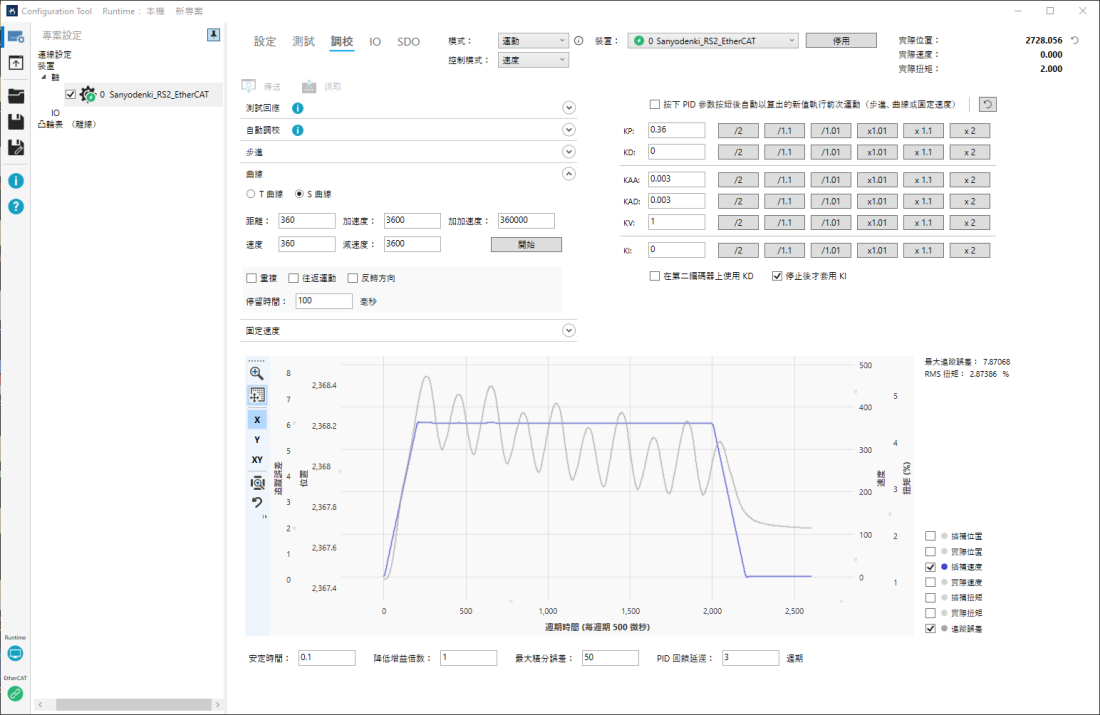
T & S 曲線
從梯形或 S 曲線創建速度曲線,使用曲線時,聚焦於插補速度及追蹤誤差。
T 曲線:由速度曲線建立梯形曲線。
S 曲線:由速度曲線建立 S 曲線。
距離:軸移動的距離。
速度:速度。
加速度:加速度。
減速度:減速度。
加加速度:加加速度。
開始:開始運動。
其他選項:請見 步進 中的說明。
固定速度
將軸以固定速度運作一段時間以測試其效能。
速度:軸的速度。
執行時間:固定速度的執行時間。
開始:開始固定速度測試。
PID 參數
使用比例、積分、微分演算法處理測試過程中產生的誤差,以為控制系統計算出適當的輸出值。
按下 PID 參數按鈕後自動以算出的新值執行前次運動(步進、曲線或固定速度):當 PID 參數值改變時重複最後一個動作。例如最後的動作為從速度模式建立 S 曲線,若勾選此選項並點擊 KP 的 x2,系統會將 KP 值乘二並用該值建立一個 S 曲線。
重設所有 PID 參數 (  ):將所有 PID 參數重置為預設值。
):將所有 PID 參數重置為預設值。
KP:比例增益。
KD:微分增益。
KAA:加速度前饋增益。
KAD:減速度前饋增益。
KV:速度前饋增益。
KI:積分增益。
/2:將值除以二。
/1.1:將值除以 1.1。
/1.01:將值除以 1.01。
x1.01:將值乘以 1.01。
x1.1:將值乘以 1.1。
x2:將值乘以 2。
在第二編碼器上使用 KD:在第二編碼器上使用 KD。
停止後才套用 KI:在穩態誤差使用 KI。
安定時間:決定軸在完成移動後何時開始使用 降低增益倍數(單位:秒)。
降低增益倍數:安定時間 過後,KP、KI 與 KD 乘上此倍數。
最大積分誤差:最大積分誤差,使用 KI 時需指定一個最大積分誤差值。
PID 回饋延遲:指週期數,此週期數為 KINGSTAR 用來比較實際位置與之前發送的命令位置的回溯週期,通常為 3 個週期。
參見